UAVで写真測量をする時、基本的には起工測量で確認した公共座標を使って測量を行いますが、近くに公共座標がない場合、任意座標で測量をすることもあります。その際のPix4Dの処理の仕方を説明します。
公共座標を使った測量(既知点座標)の処理手順とおおまか一緒なので、任意座標の処理のみ詳しく説明します。
それ以外のステップの説明はこちらを参考にしてください。
Pix4Dmapperにおける任意座標の処理
① 既知点座標の処理と同じく、新規プロジェクトを作って、写真を取り込みます。
② 座標系の変換はしません。
(パラメータを計算しますので、しても影響はないです。)
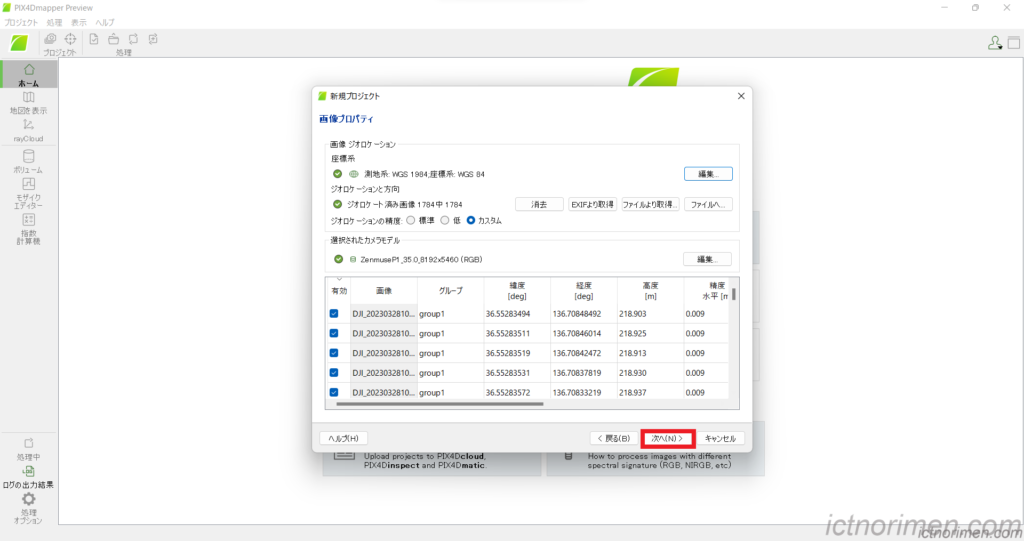
③ 出力座標系は、「任意の座標系」にを選択し、初期処理を回します。
※ 初期処理が終わったら、必ずコピーして初期処理までのデータをバックアップします。

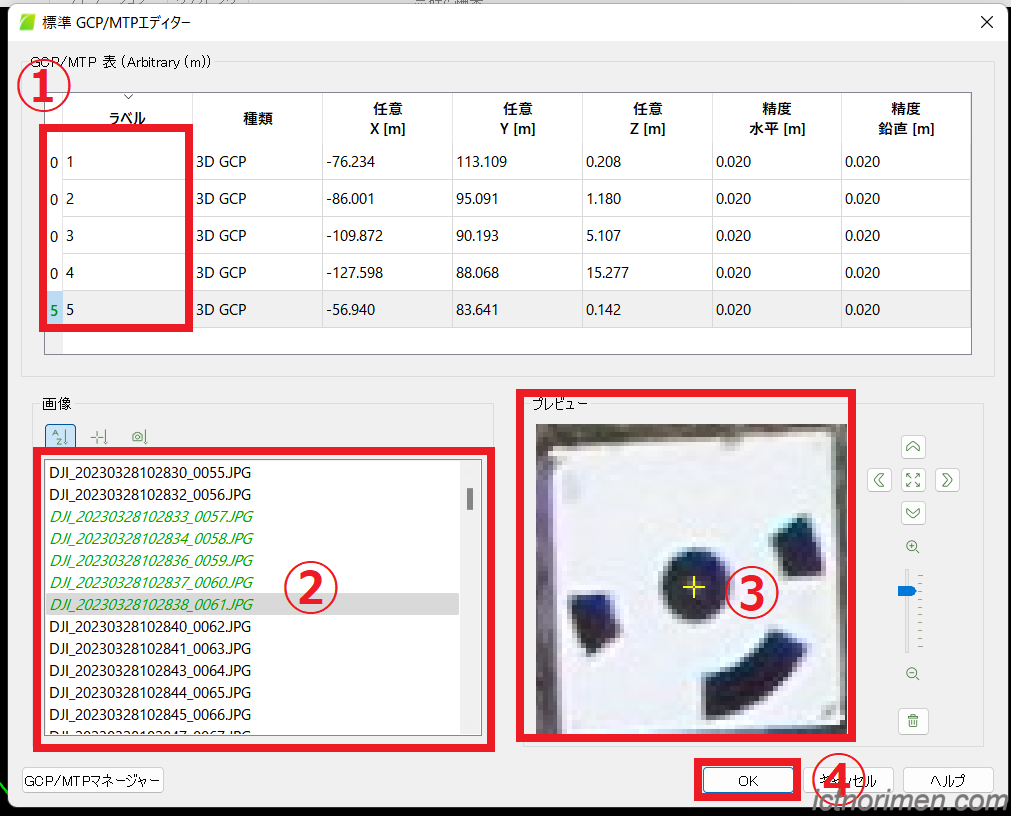
④ 対空標識をインポートして、「標準エディター…」をクリックします。

⑤ すべての対空標識の中心を5枚ずつ紐づけます。全部掴んでから「OK」をクリックして、再最適化します。
(UAVで撮影した写真の座標は世界測地系です。
既知点座標では、写真の座標と対空標識の座標の測地系を統一すればいいだけですが、
任意座標では、対空標識の座標が測地系のどこに表されているのかが分からないので、
この作業をすることで世界測地系に対空標識の場所を教えることができます。)
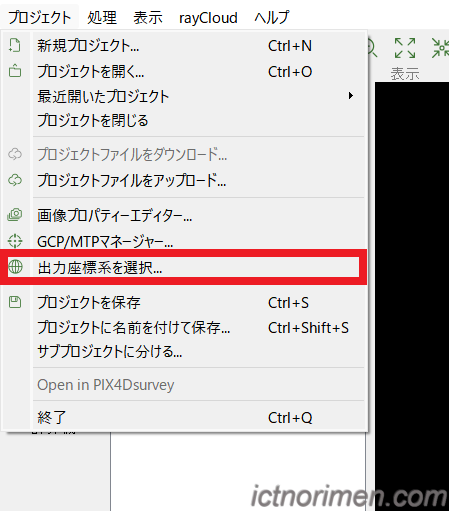
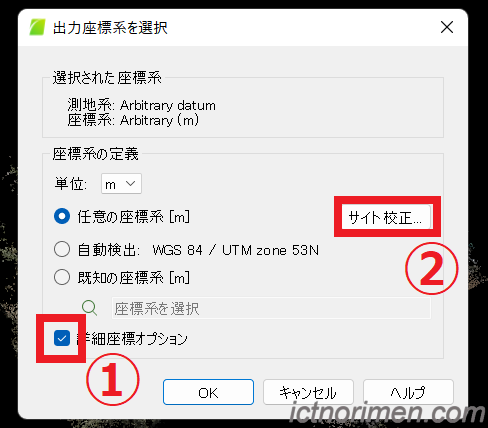
⑥ 「プロジェクト」の「出力座標系を選択…」から座標系の定義が任意の座標系であることを確認して、「詳細座標オプション」にチェックを入れます。それから、「サイト校正…」をクリックします。
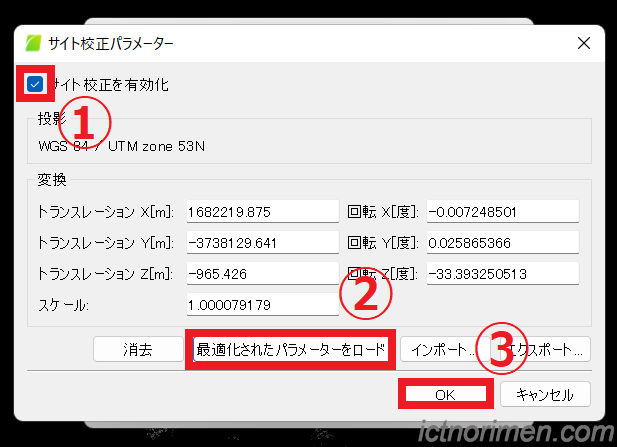
⑦ 「サイト校正を有効化」にチェックを入れ、「最適化されたパラメータをロード」をクリックすると、対空標識の座標と世界測地系の差(パラメーター)が計算されます。そして、「OK」を押し、標定点がしっかり初期処理の点群に載せているかを確認します。
(計算されたパラメーターをすべての点に補正をかけることによって、しっかり精度を持つ点群にすることができます。)
⑧ 問題なかったら、既知点座標の処理と同じように、精度のための紐付け作業に戻り、処理をかけば完了になります。
※ 点群が再最適化する時薄くなったら、このパラメータをエクスポートして、バックアップしたものにインポートして、校正をかけてから紐づけ作業に入った方がいいです。
{kind=link}
コメント