
国土地理院のUAV を用いた公共測量マニュアル(案)を参照すると、UAV写真測量のプロセスは主に下記の通りとなります。
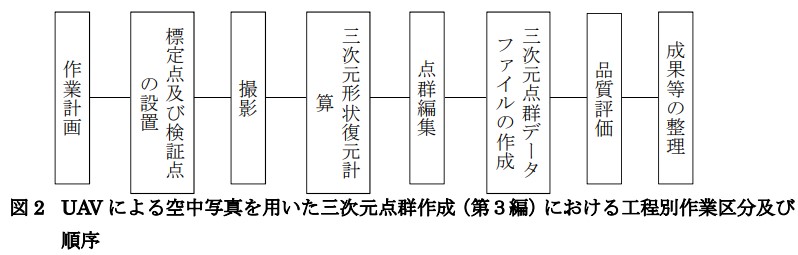
1. 作業計画
現場に入る前には平面図等で計測対象範囲を確認し、標定点および検証点の配置計画を立てます。
(対空標識に関する記事はこちらを参照ください)
下記の計画では、セオリー通り外周を囲うように外部標定点を設置し、中心に内部標定点を設置しています。
そして、精度検証用の検証点を内部に2点設置する計画となっています。

2. 対空標識の設置と座標取得
現場に到着したら、計画に基づいて法面の形状や凹凸に応じて微調整して配置。このあたりは現場での測量とデータ解析の数をこなすと適切な配置がわかってきます。
対空標識を設置する作業は法面上での作業となるので、現場作業工程の中でも場合によっては計測以上に手間のかかる工程です。
対空標識を設置した後か、現場を計測したあとに、標定点と検証の座標を取得します。
対空標識の中心点を取得することになりますが、TSを使ってミラーでの計測か、ノンプリで計測を行います。このとき座標を計測する精度も写真測量の精度に大きく影響しますので、精度良く座標を取得しましょう。
RTK-GNSS測位の場合は、この段階で地上の基準局も設置しておきましょう。
3. テストフライト & 飛行ルート作成
現場に到着する間に自動飛行計画をシミュレーションしておくことは可能ですが、最終的な飛行計画は現場でテストをしてから決定します。
現場ではテストフライトとして、樹木の高さや障害物が干渉しないかを調査し、安全な高度やルートでドローンが飛行するようにします。
安全に飛行できるルートを前提として、ドローンを飛ばす速度・対地高度(オフセット)、カメラ角度、写真のオーバーラップ率を決定します。オフセットの決定には地上画素寸法を決定しておく必要があります。対地高度は、地上画素寸法 ÷ 使用するデジタルカメラの1画素のサイズ × 焦点距離 以下とし、地形や土地被覆、使用するデジタルカメラ等を考慮して決定します。
カメラの性能が低いと、対地高度を低く設定する必要があるので、樹木や障害物と干渉する確率も高くなります。
カメラ角度について、土工など平面的な測量の場合は、カメラを真下に向けた水平飛行計測が基本です。
法面の計測はそれよりも複雑で、斜面の形状を考慮してカメラの角度を調整する必要があります。起伏のある法面や法枠などの構造物を死角なく撮影するには、カメラのアングルを変えた飛行計画を複数設定する必要もあります。
写真のオーバーラップ(重複)率は、下記の通り縦方向(UAVの進行方向)のラップ率が80%以上、横方向のラップ率60%以上が基本ですので、それ以上になるように計画を作成しましょう。
斜面を撮影する自動飛行計画を作成するのが難しいからと手動で撮影を行うと、上記のすべての設定にばらつきがでるので結果として計測精度は安定しません。
テスト飛行が済んで自動飛行計画が作成出来たら、いよいよ本計測を行います。
4. 本計測
自動飛行ルートがしっかり組めていれば、本計測はドローンが勝手にやってくれます。
法面の場合は障害物が多いので、計測中は見張りをつけて事故のないように注意しましょう。万が一の際は緊急回避などを行う必要があるので、プロポからは手と目を離さずにパイロットはいざというときは手動で対応できるようにしておく必要があります。
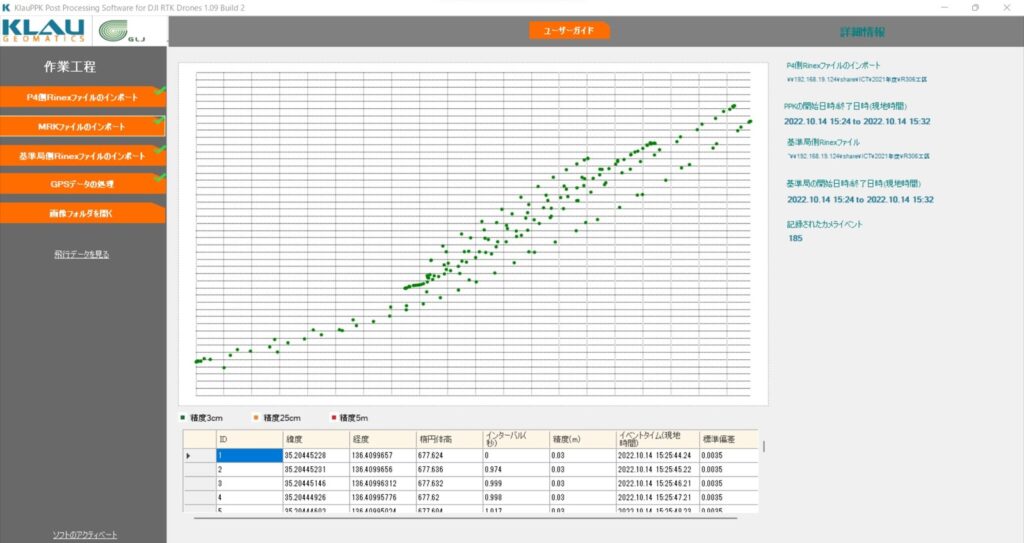
5. データ処理
PPKで処理を行う場合は、撮影写真をソフト(例:KLAUPPK)にかけて処理します。
Pix4Dなどのソフトウェアを使って写真を点群にしていきます。
PPKの場合、まずは写真と上記の処理で取得した補正情報を取り込んで初期処理を行います。
対空標識の座標を取り込んで検証点を設定します。撮影した写真から対空標識の座標を選択して写真と標定点の座標を紐づけていくことで、精度誤差を縮めていきます。
一通り紐づけが完了したら、再最適化を実施して品質レポートで計測精度を検証します。
この段階で出来形管理として使える計測精度を満たしている(法枠工なら±10mm以内の誤差)必要があります。
求める計測精度を満足していたら、点群にして出来上がりです。
{kind=link}