
UAV写真測量においてドローンを自動飛行させるためには、地図情報を用いてフライトアプリケーションで飛行ルートを作成します。
平面的な工事の土工であれば大きく影響しないケースもありますが法面の工事では、現場が斜面で立体的なほか、樹木や障害物の干渉も多いので地図情報の高さと実際の高さ情報がずれていると、フライトの安全性に影響します。
そこで、法面工事の場合はとりあえず現場踏査の際などにドローンを水平に飛行させカメラを真下に向けて現場写真を撮影しておきます。その画像を使えば、UgCS Mapperなどのアプリケーションでオルソ画像を作成することができます。
フライトアプリケーションによって飛行ルートの作成方法やオルソの作成方法には違いがありますが、オルソ画像の作成は難しくありません。
ここではUgCSというフライトアプリケーションでルートを組む前に、UgCS Mapperを使ってオルソ画像を作成していく過程を説明します。

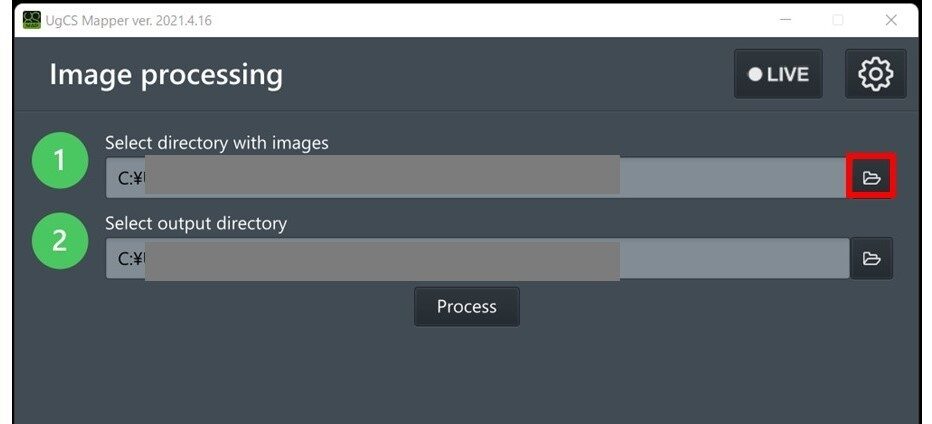
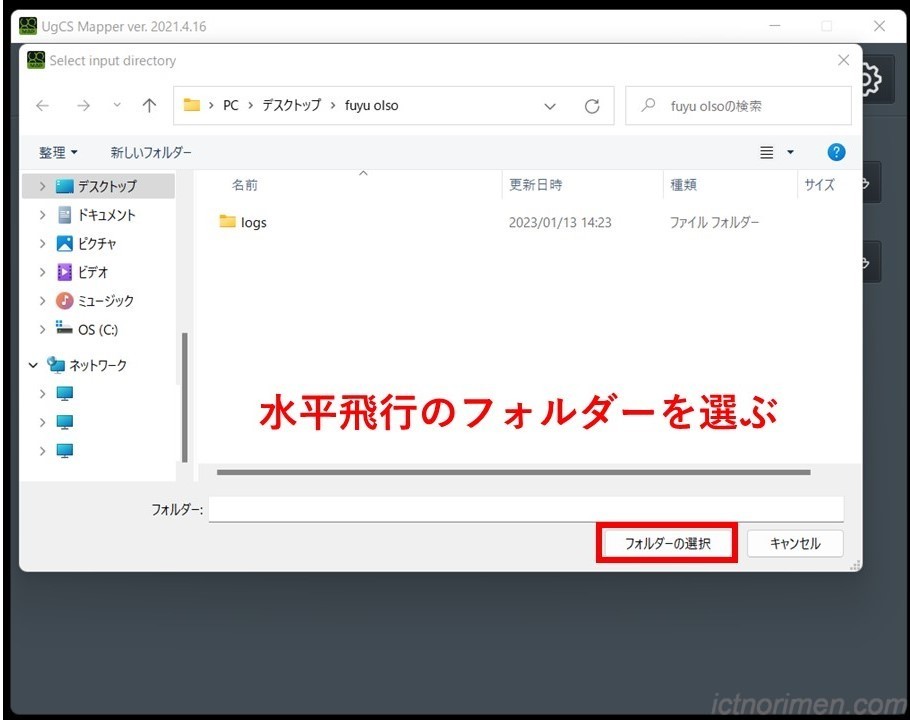
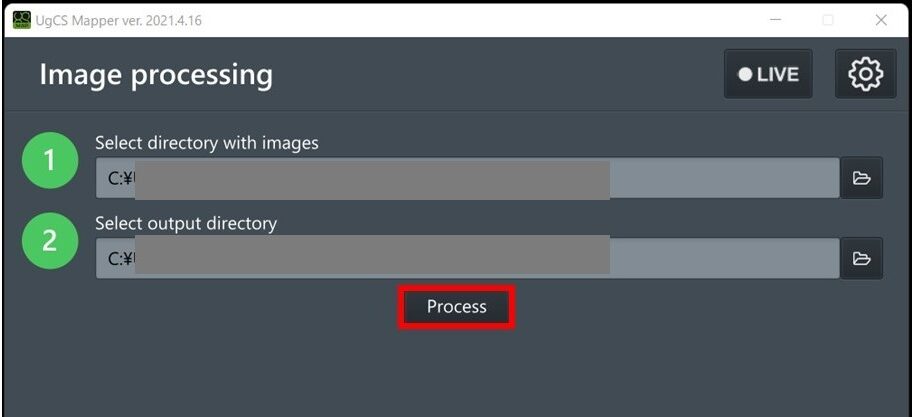
まずは、現場でカメラを真下に向けて水平飛行で撮影してきた写真を取り込みます。
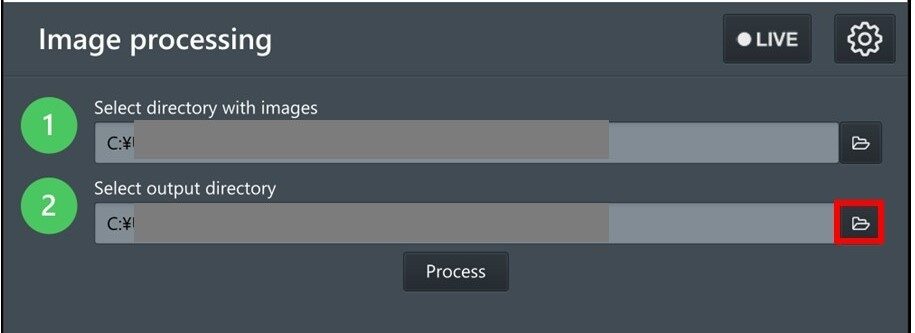
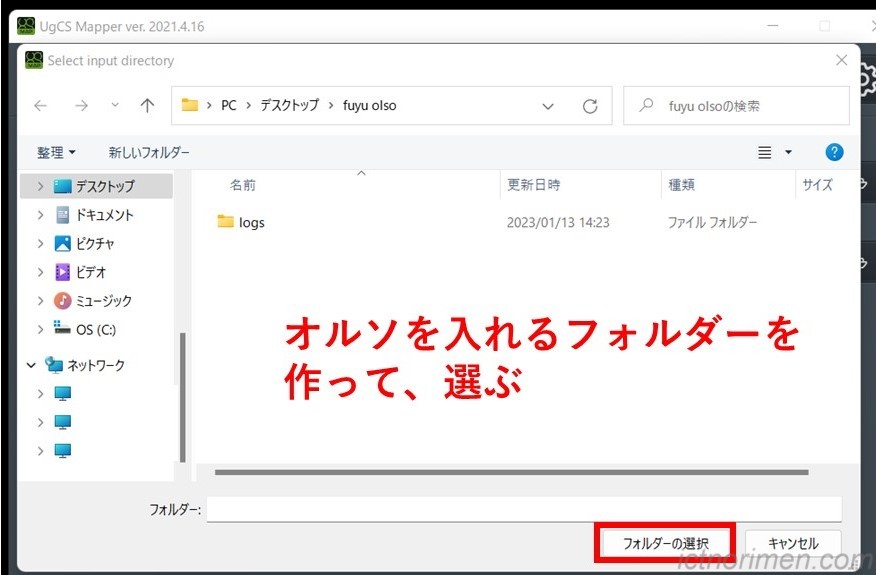
オルソ画像を出力する場所を選択します。
出力先を選択出来たら、オルソ画像作成の処理を開始します。
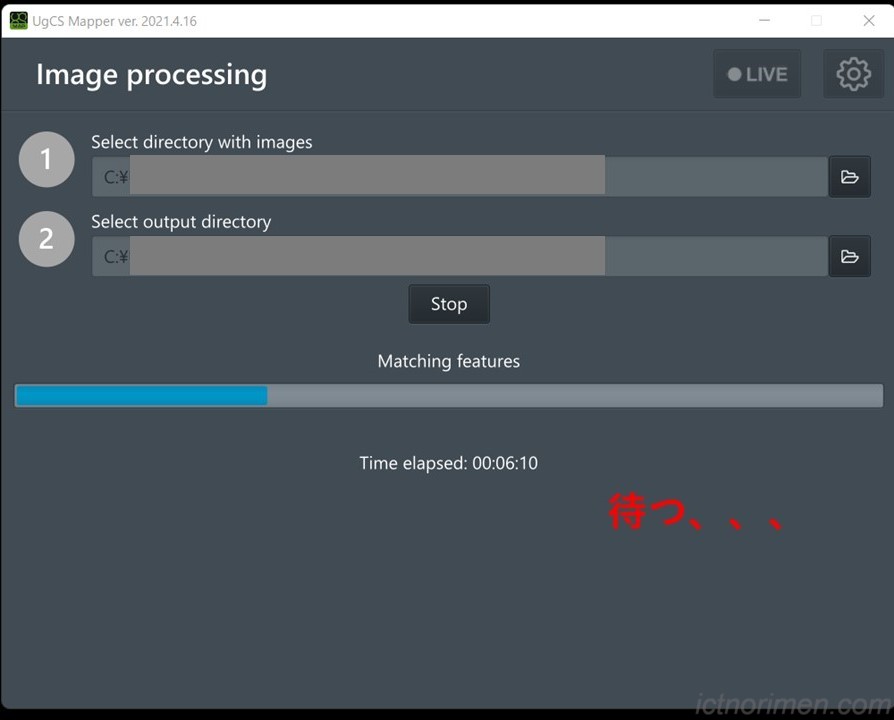
処理開始ボタンをクリックしたら、写真の処理が開始されますのでしばらく待ちます。
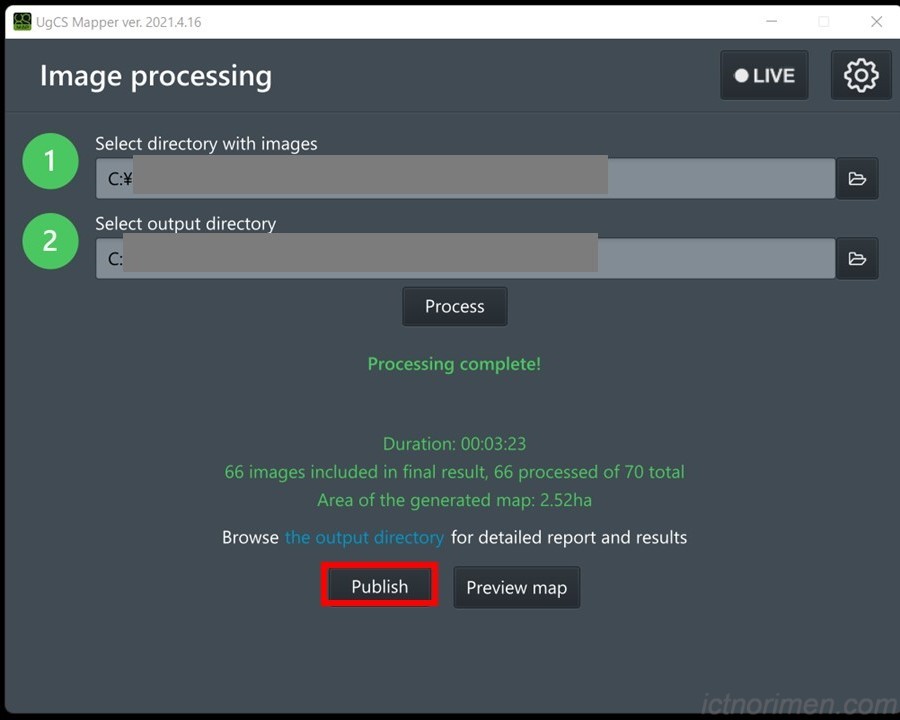
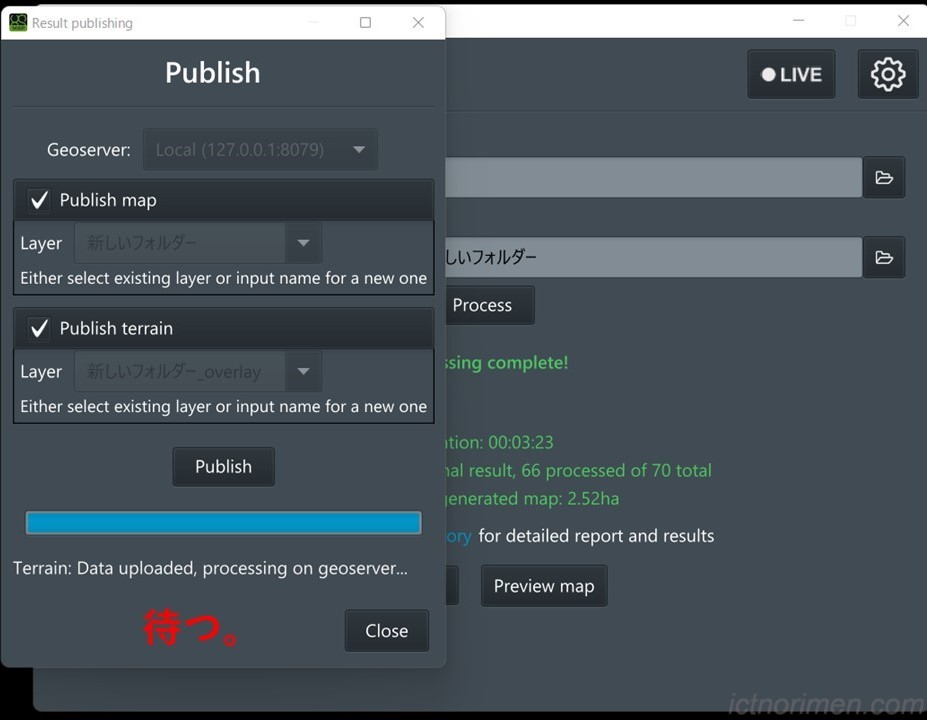
写真の処理が完了したら、UgCSのサーバー経由で高さ情報などをUgCSにアップしますので、
Publishをクリックします。
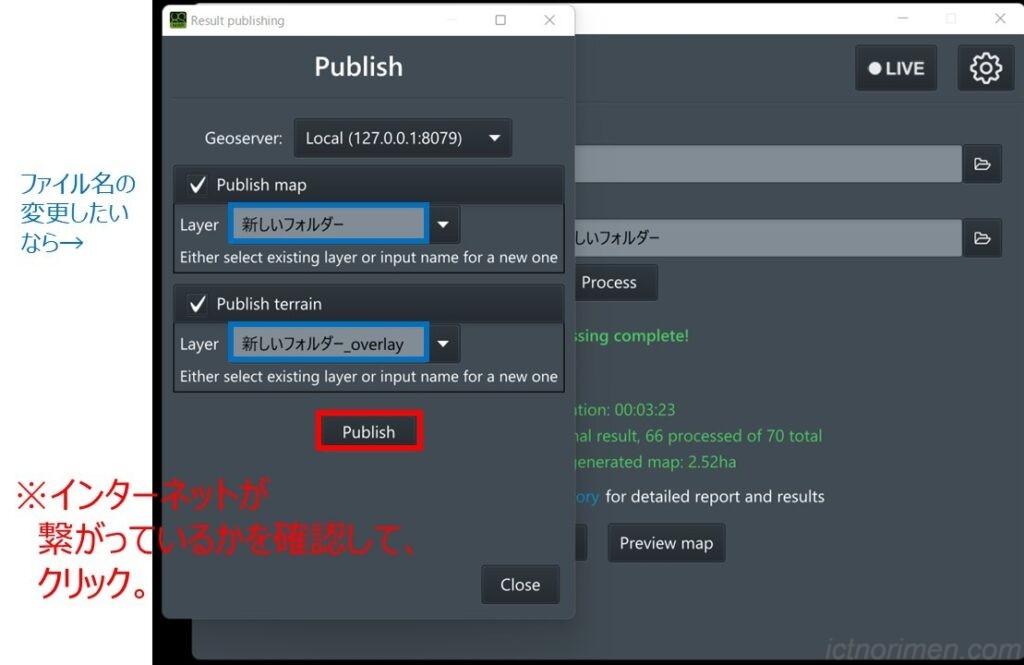
アップする間、しばらく待ちます。
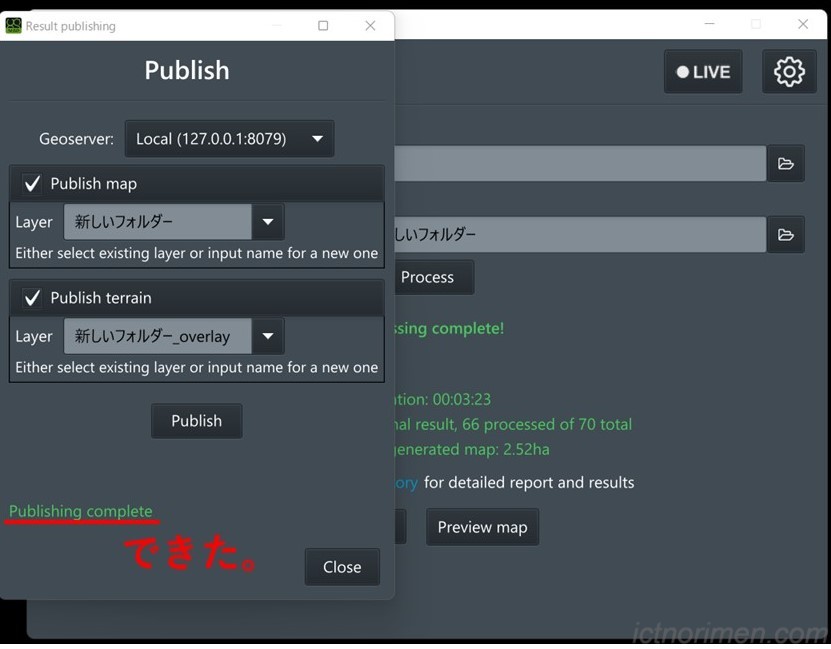
完了したら、オルソ画像作成完了です。
オルソ画像が作成出来たら、フライトアプリケーションに取り込んだ情報をもとに、フライトルートを作成していきます。
ここでは、フライトアプリケーションUgCSを使って自動飛行ルートを組んでいきます。
{kind=link}