
Site Scanは、iPad上で簡単にUAV写真測量の斜面正対の自動飛行ルートを作成できるソフトです。
高低差が控えめ+広い現場に適したサーベイや縦の面に適したバーティカルなど、いくつかのモードがあるので、適したモードで自動飛行のプランを作成します。
現場で測量することが決まったら、事前にプランを作成しておきましょう。

フライトプラン作成の手順
1. プラン作成のモードを選択(今回は法面なのでバーティカル)
2. マップで飛行場所を検索
3. 撮影したい面と範囲を作成
4. 撮影範囲の最低・最高高度を入力
5. 最低飛行高度と最高飛行高度を入力
6. そのほかの情報を入力
7. ラップ率と飛行位置を設定
8. フライトを保存
実際の画面の画像を出しながら、以下で詳細を説明します。
1. プラン作成のモードを選択
該当の現場を選び、モードを選択します。
今回は急勾配の現場を撮影したいため、バーティカルが適しています。

機体は右上のプルダウンから適したものを選択してください。
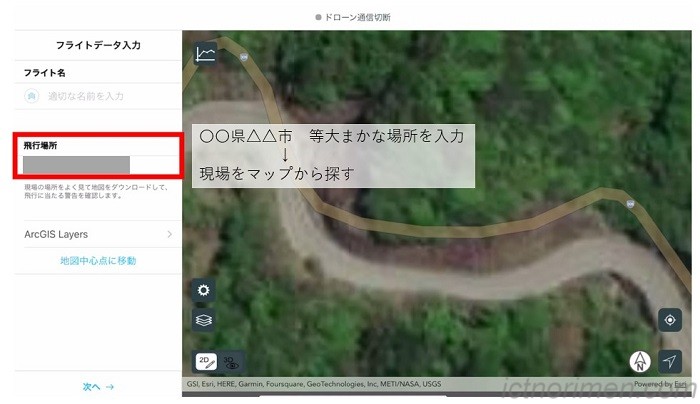
2. マップで飛行場所を検索
飛行場所に現場の所在地を入力すると、マップに周辺が表示されます。
マップから現場を探して次へ進みます。
3. 撮影したい面と範囲を作成
画面に青い線が表示されるので、その線を撮影したい箇所に合わせます。
白い丸をタップすると変化点が増えるので、面に合わせてカーブを増やすことも可能です。
青い線と同じ形で表示されている緑の線が、UAVが飛行するラインです。
このラインが計測対象側に表示されたときは飛行向きの切り替えをタップしてください。
(この切り替えを忘れると山に突っ込むことになります。)
次にSELECT-MODEを変更します。
最初はFixedになっているのでVariableに変更すると、作成した線の形で範囲が作成されます。

4. 撮影範囲の最低・最高高度を入力
計測対象の最低・最高高度を入力します。
この高度は公共座標の標高とは異なり、UAVが飛び立つホームポジションからの高度です。
5. 最低飛行高度と最高飛行高度を入力
UAVの飛行ルートでの最低飛行高度と最高飛行高度を入力します。
傾斜をみて、おおまかな値を設定します。

6. そのほかの情報を入力
UAVがルートのスタート地点へ向かうときの高度と、飛行中のオフセット(対地高度)を入力します。
スタート地点へ向かうときの高度は、電線や木などの障害物に当たらない安全な高度を設定します。
飛行経路の設定に表示されている項目の入力が終わったら、詳細設定をタップします。

7. ラップ率と飛行位置を設定
適したラップ率を決め、開始位置を設定します。
バーティカルの場合は近くからを選ぶと法尻からスタートし、遠くからを選ぶと法肩からスタートします。
現場の状況をみて、適したほうを選んでください。

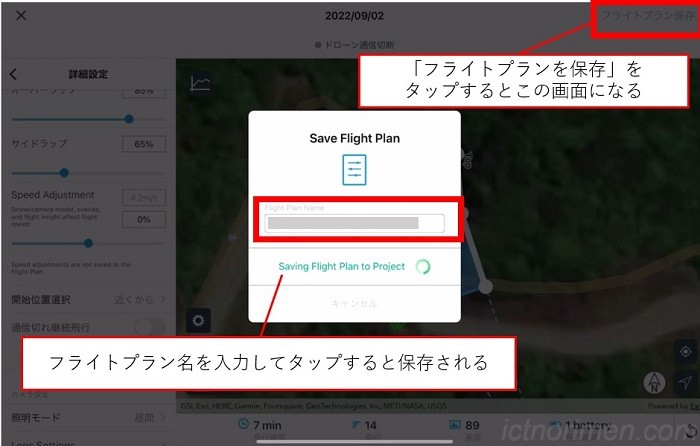
8. フライトを保存
最後にフライト名を決めて保存をすれば、Site Scanでの自動飛行プランが完成します。
現場で飛行する際に計測対象の範囲や高さを確認してから、飛行させます。
{kind=link}