
UgCS Mapperでオルソ画像を作成したら、UgCSで自動飛行ルートを作成していきます。
UAV写真測量において、パイロット(操縦者)は現場でプロポを握ってその時々の現場条件に臨機応変に対応することが求められますが、自動飛行ルート(フライトプラン)は安全と計測精度のカギを握っています。
UgCSによるフライトプランの作成の流れ
1.UgCS Mapperでオルソ画像を作成する
2.オルソマップをUgCSに取込む
3.飛行方法を決める
4.計測範囲を囲む
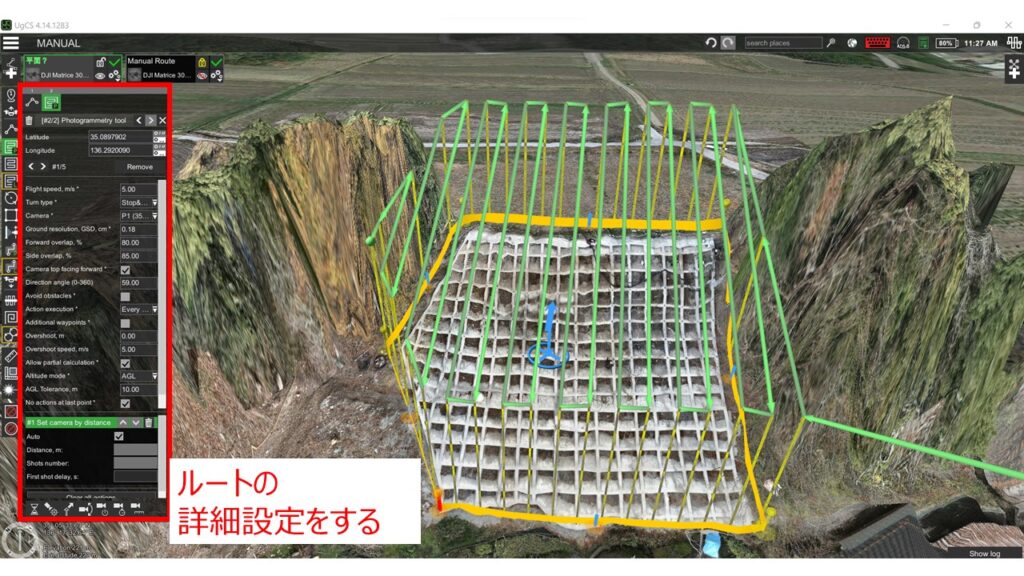
5.飛行ルートを作成し、詳細設定を行う
6.作成したルートをプロポに取込む
7.飛行ルートのシミュレーションを行う
まずは、オルソマップをUgCSに取込みます。
Maplayersを選択します。
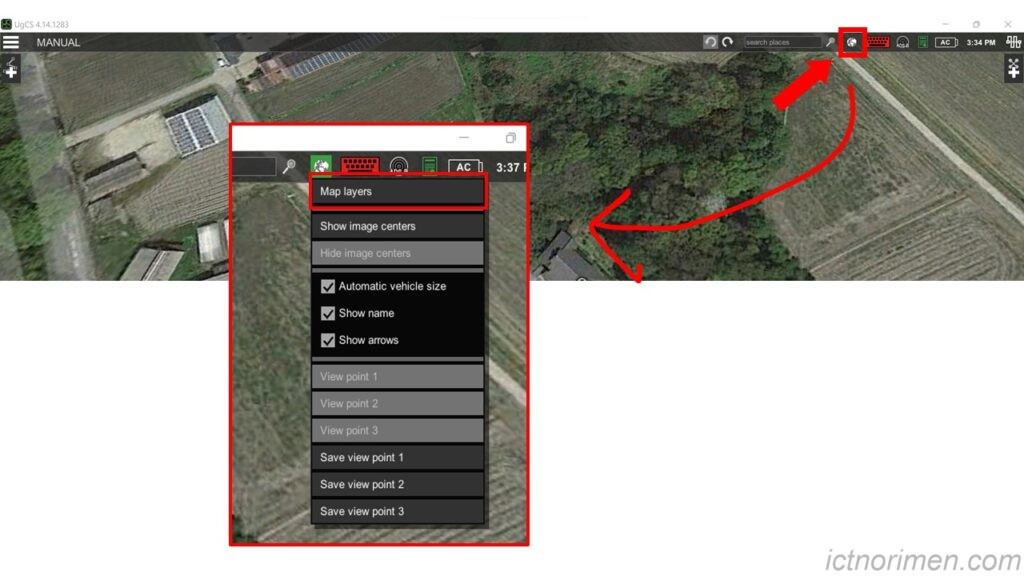
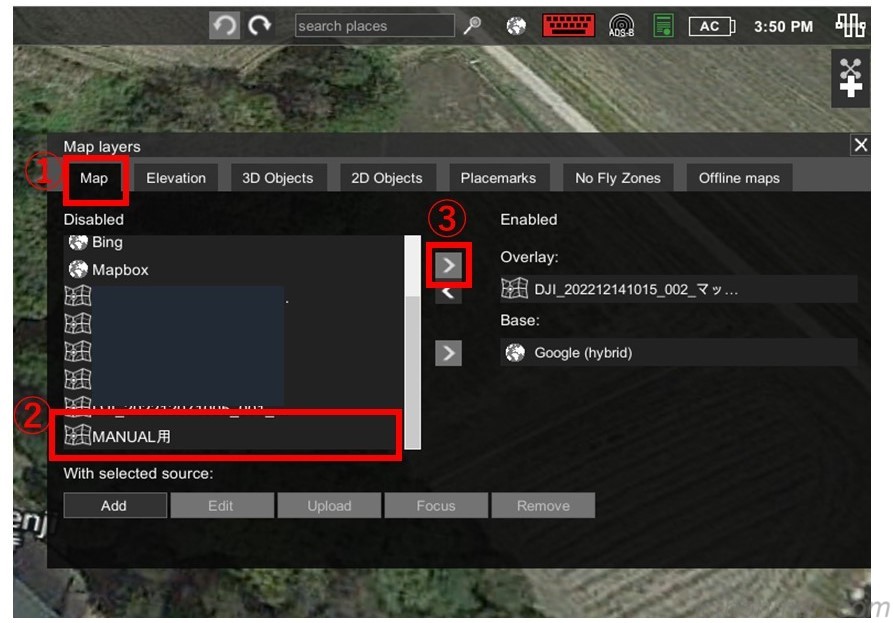
Maplayersを選択したら、数字の順番に捜査していきます。
Baseは、Googleのマップが設定されているので、作成したオルソマップを選択して重ねていきます。
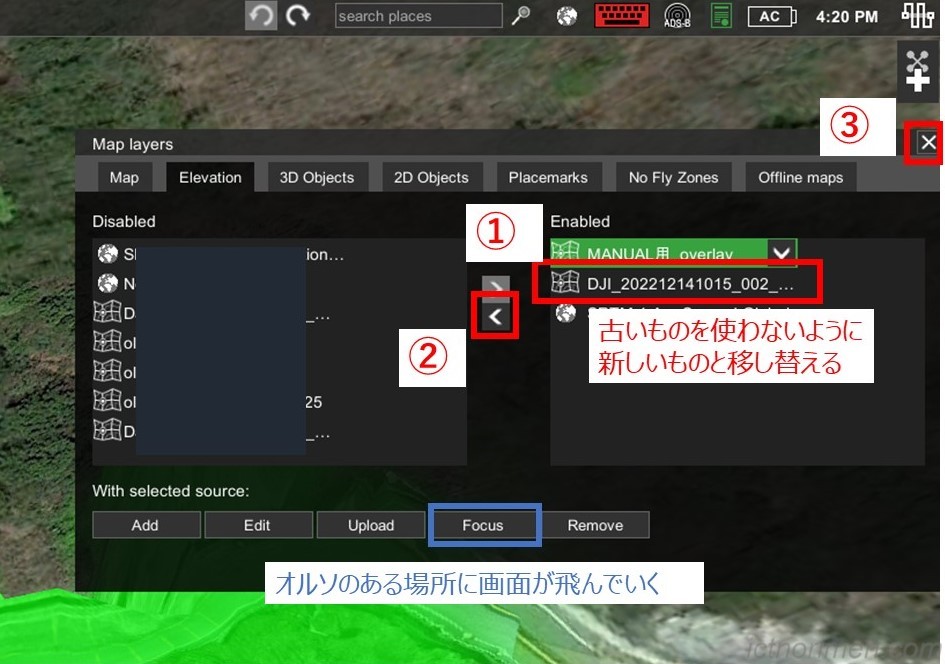
施工段階に応じて同じ現場で計測を何度もしている場合や、樹木の伐採前後で計測する場合など、オルソマップを変更して正確な高さ情報を持たせて計測を行うことが望ましいです。
その場合、前回計測時の古いオルソマップを選択しないようにDisabledに移して、新しいものを選択します。
これで、UgCSへのオルソマップ取込みは完了です。
それでは、UAV写真測量の自動飛行ルート(フライトプラン)を作成していきます。
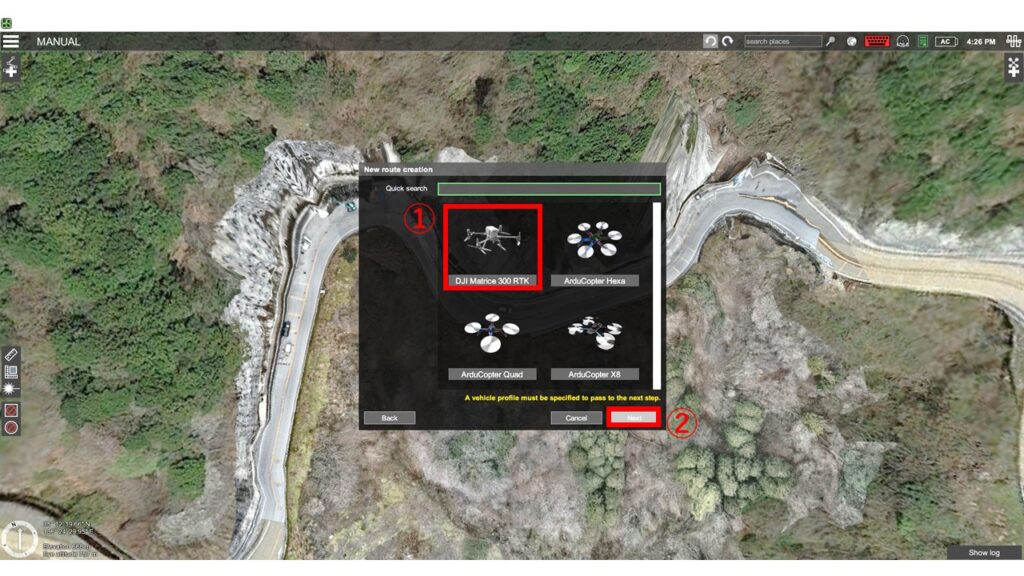
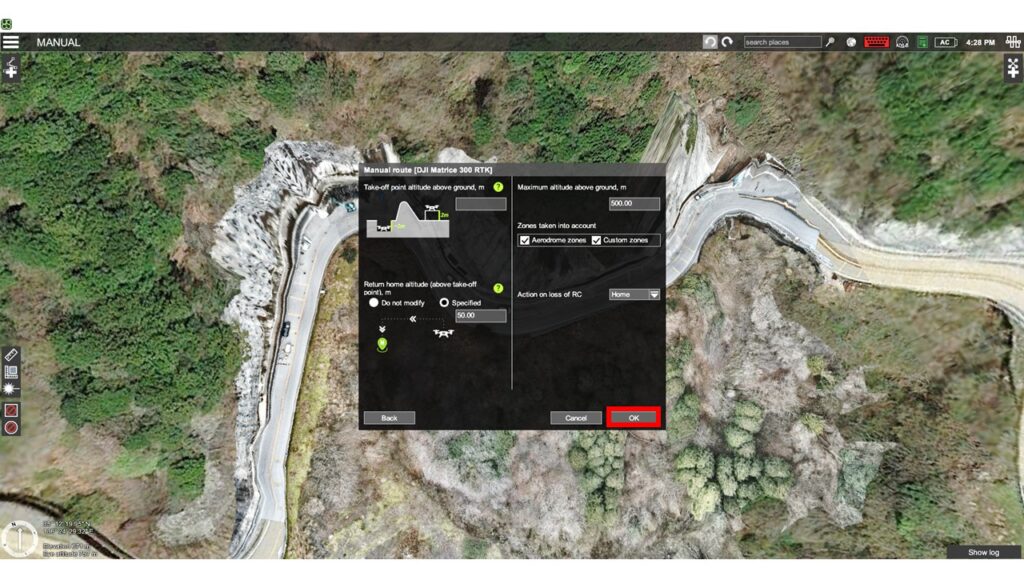
まずは、ルート名を決めて飛行するドローンを選択します。
今回はMatrice300RTKを使用します。

この例では、勾配が立っている法面なので、カメラを真下に向けて水平に飛行するよりもカメラを斜面に正対するような飛行ルートを組んでいきます。
ウェイポイントにしたい場所をダブルクリックします。

ウェイポイントの高さを設定します。

飛ばしたい範囲(施工延長)をダブルクリックしてルートを作成していきます。
斜面に向き合って飛行するように折れ点ごとにウェイポイントを作成します。
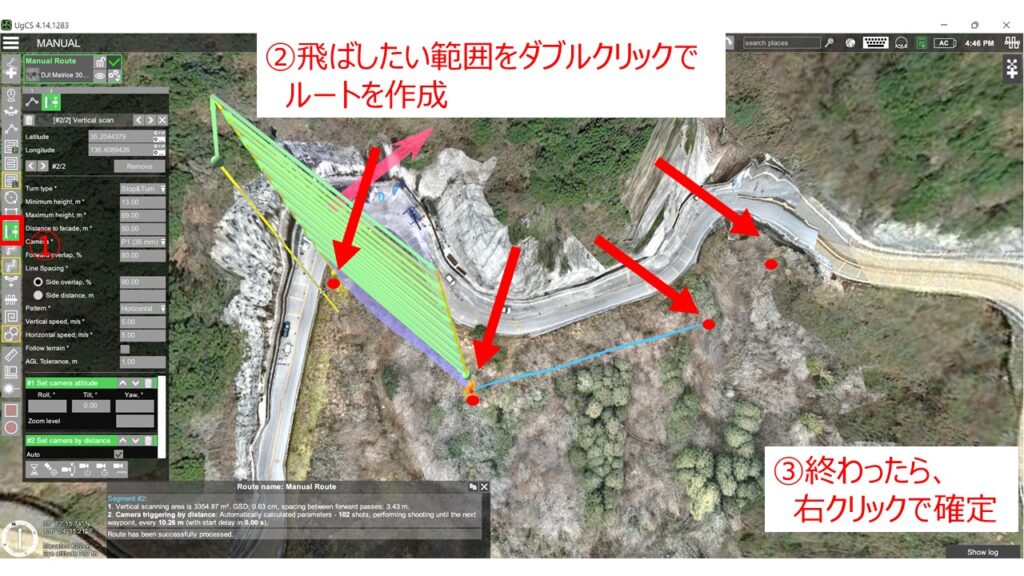
緑のラインの飛行ルートが作成できました。
これではこのルートでドローンが飛ぶことしか設定できていないので、撮影の諸条件の詳細を決定していきます。
同じルートで飛ばしていても、この設定で計測精度は変わります。
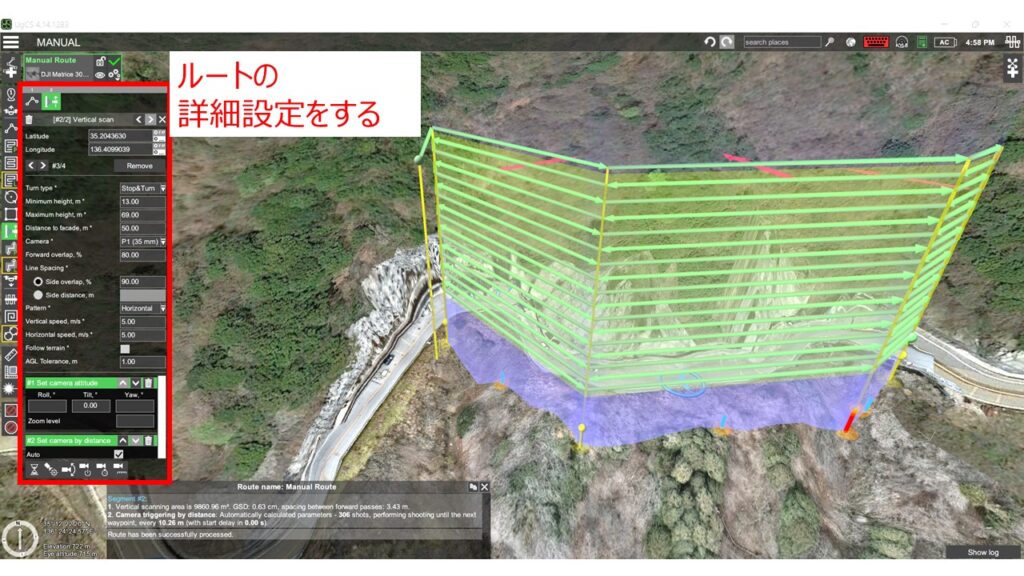
詳細設定の項目です。
計測する法面の形状や施工範囲に応じて、飛行する高度を決定します。
オフセットは斜面からの垂直距離になります。どれだけ斜面から離れて設定するかをここで決定します。求める地上画素寸法が同じであれば、カメラの性能が良いほどオフセット距離を大きくできるので、樹木に接触する可能性が低くなるほか、計測の効率も上がって飛行ルートの自由度も高まります。
このあたりの高度やオフセットの設定のために、オルソマップが実際の現場の高さ情報を持っていることが重要です。
写真のオーバーラップ率を決定します。進行方向80%以上、横方向60%以上を基本として、現場の条件と求める精度に応じてラップ率を決定します。
地形フォローは、斜面の起伏を追従してオフセットを一定に保つかどうかの設定です。
ドローンは、設定した高度と斜面からの距離を保って飛行しますが、カメラを適切な角度で斜面に向けて撮影する必要があります。法面の勾配や斜面の形状を考慮して、カメラの角度を調整して全体的に斜面に正対するようにします。

以上が、いわゆる斜面正対飛行のフライトプラン作成手順です。
続いて、法面が寝ている場合や平面的な土工の現場等に適用されるカメラを真下に向けた水平飛行のルート作成例を紹介します。
斜面正対飛行と同様に、ウェイポイントにしたい場所をダブルクリックで選択して、ウェイポイントの高さを設定します。


斜面正対飛行の場合は、施工延長を線上に選択しましたが、水平飛行は計測対象を真下に見て撮影するため、計測対象範囲を少し広めに囲みます。
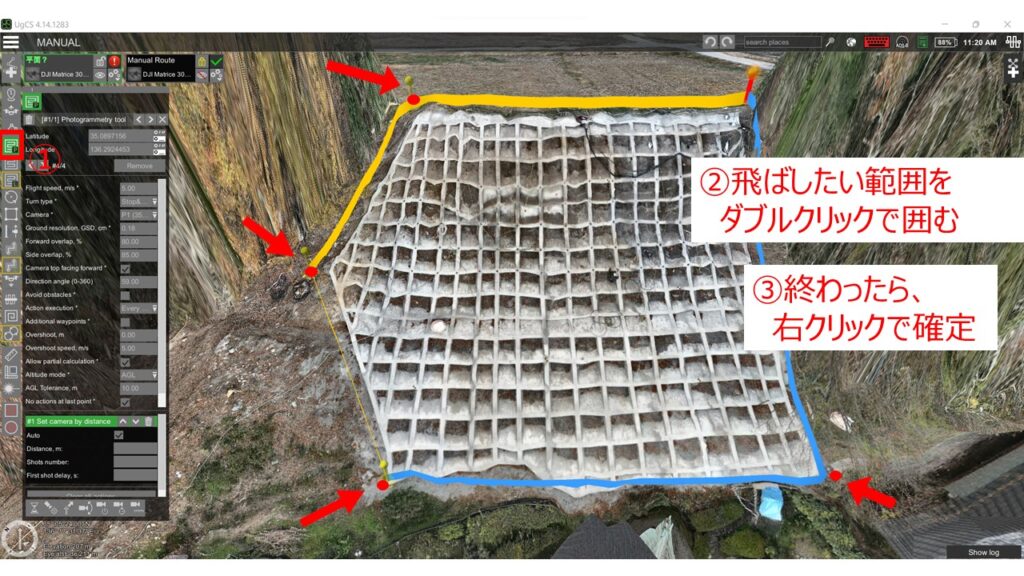
計測対象の法面を囲んでやると、ウェイポイントからドローンが飛んでいき、緑のラインを飛行するルートが作成できました。
水平飛行は、斜面正対飛行に比べて考慮することが少なく比較的単純にフライトプランを作成できます。
法面が寝ている場合などは、斜面正対にこだわらずに水平飛行を選択することも有益です。
以上が、斜面正対飛行と水平飛行のフライトプラン作成手順です。
このあと、作成した飛行ルートをプロポに取り込んで、場合によってはソフト上で飛行のシミュレーションを行って完了となります。
点群の精度や密度を高めていくほど、フライト回数や飛行ルートやプランの数は多くなります。
実際に現場で飛ばしてみて、フライトプランを微調整も行っていきます。
とくに法枠の場合、複数の飛行プランを組み合わせて撮影をすることで桁の側面や裏も死角なく点群にすることが可能になります。
{kind=link}